Project: Track an Object in 3D Space
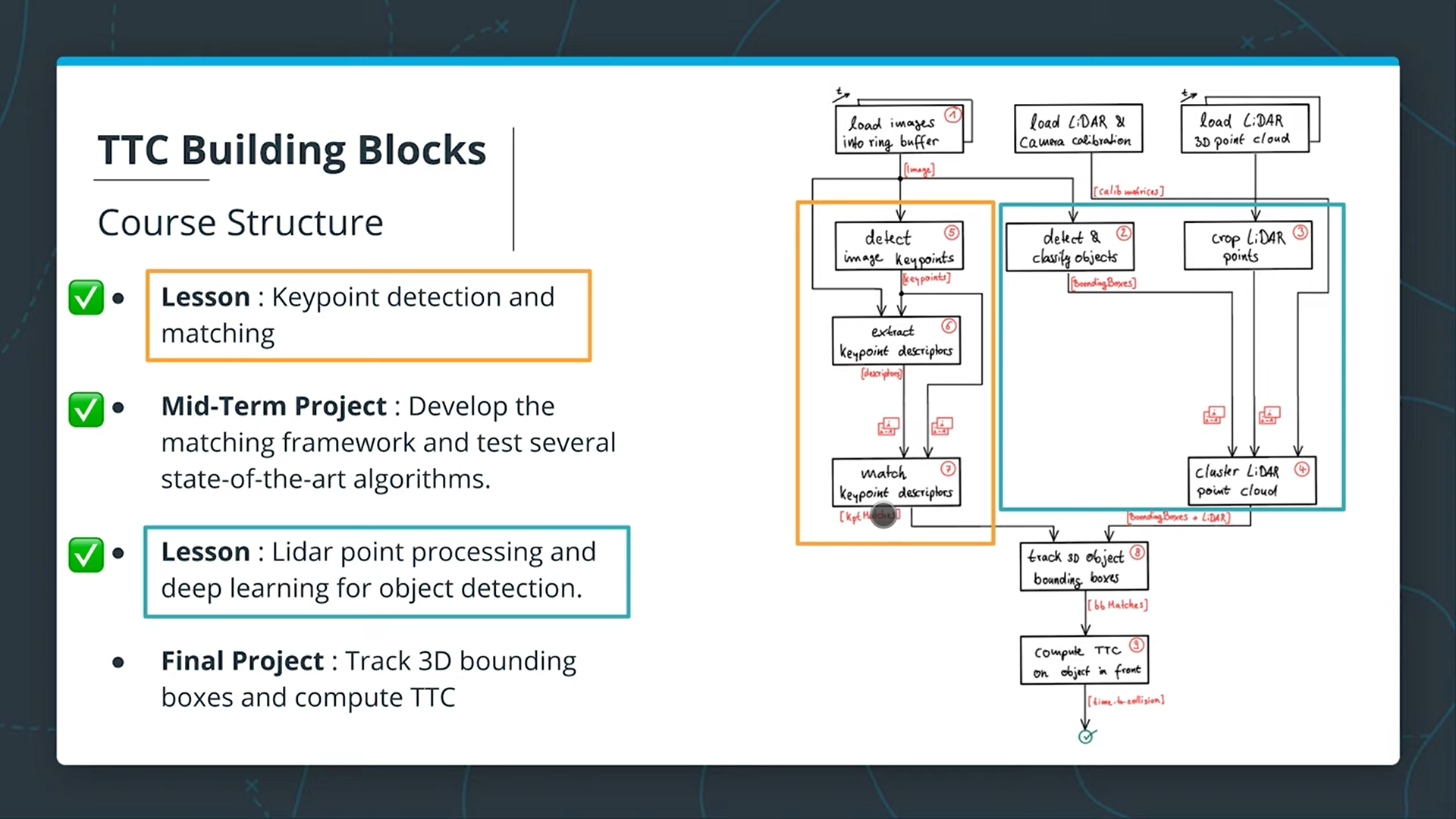
Orange Block: gives keypoints matches in images but they are not bounded to any object.
Blue Block: gives a group of bounding boxes augmented with lidar points.
Now, we need to track 3D bounding boxes over time (associate bounding boxes between neighboring frames by looking at the keypoints correspondences within those bounding boxes).
We have 4 major tasks:
- Develop a way to match 3D objects over time using key points correspondences
- Compute TTC using Lidar measurements
- Compute TTC using Camera measurements (requires us to associate keypoints matches to to ROI, then compute TTC)
- Conduct various tests for the framework to identify the most suitable detector/descriptor combination for TTC estimation and search for problems that can lead to faulty measurements by the camera or the lidar sensor.
FP.1 : Match 3D Objects
In this task, please implement the method "matchBoundingBoxes", which takes as input both the previous and the current data frames and provides as output the ids of the matched regions of interest (i.e. the boxID property)“. Matches must be the ones with the highest number of keypoint correspondences.
The task is complete once the code is functional and returns the specified output, where each bounding box is assigned the match candidate with the highest number of occurrences.

FP.2 : Compute Lidar-based TTC
In this part of the final project, your task is to compute the time-to-collision for all matched 3D objects based on Lidar measurements alone. Please take a look at the "Lesson 3: Engineering a Collision Detection System" of this course to revisit the theory behind TTC estimation. Also, please implement the estimation in a way that makes it robust against outliers which might be way too close and thus lead to faulty estimates of the TTC. Please return your TCC to the main function at the end of computeTTCLidar.
The task is complete once the code is functional and returns the specified output. Also, the code is able to deal with outlier Lidar points in a statistically robust way to avoid severe estimation errors.
FP.3 : Associate Keypoint Correspondences with Bounding Boxes
Before a TTC estimate can be computed in the next exercise, you need to find all keypoint matches that belong to each 3D object. You can do this by simply checking whether the corresponding keypoints are within the region of interest in the camera image. All matches which satisfy this condition should be added to a vector. The problem you will find is that there will be outliers among your matches. To eliminate those, I recommend that you compute a robust mean of all the euclidean distances between keypoint matches and then remove those that are too far away from the mean.
The task is complete once the code performs as described and adds the keypoint correspondences to the "kptMatches" property of the respective bounding boxes. Also, outlier matches have been removed based on the euclidean distance between them in relation to all the matches in the bounding box.
FP.4 : Compute Camera-based TTC
Once keypoint matches have been added to the bounding boxes, the next step is to compute the TTC estimate. As with Lidar, we already looked into this in the second lesson of this course, so you please revisit the respective section and use the code sample there as a starting point for this task here. Once you have your estimate of the TTC, please return it to the main function at the end of computeTTCCamera.
The task is complete once the code is functional and returns the specified output. Also, the code must be able to deal with outlier correspondences in a statistically robust way to avoid severe estimation errors.
FP.5 : Performance Evaluation 1
This exercise is about conducting tests with the final project code, especially with regard to the Lidar part. Look for several examples where you have the impression that the Lidar-based TTC estimate is way off. Once you have found those, describe your observations and provide a sound argumentation why you think this happened.
The task is complete once several examples (2-3) have been identified and described in detail. The assertion that the TTC is off should be based on manually estimating the distance to the rear of the preceding vehicle from a top view perspective of the Lidar points.
FP.6 : Performance Evaluation 2
This last exercise is about running the different detector / descriptor combinations and looking at the differences in TTC estimation. Find out which methods perform best and also include several examples where camera-based TTC estimation is way off. As with Lidar, describe your observations again and also look into potential reasons. This is the last task in the final project.
The task is complete once all detector / descriptor combinations implemented in previous chapters have been compared with regard to the TTC estimate on a frame-by-frame basis. To facilitate the comparison, a spreadsheet and graph should be used to represent the different TTCs.
We are super-excited to receive your submission as soon as possible.