Lidar Obstacle
Detection
Stream back multiple point cloud data files and perform filtering, segmentation, clustering, and bounding box detection.
Stream back multiple point cloud data files and perform filtering, segmentation, clustering, and bounding box detection.
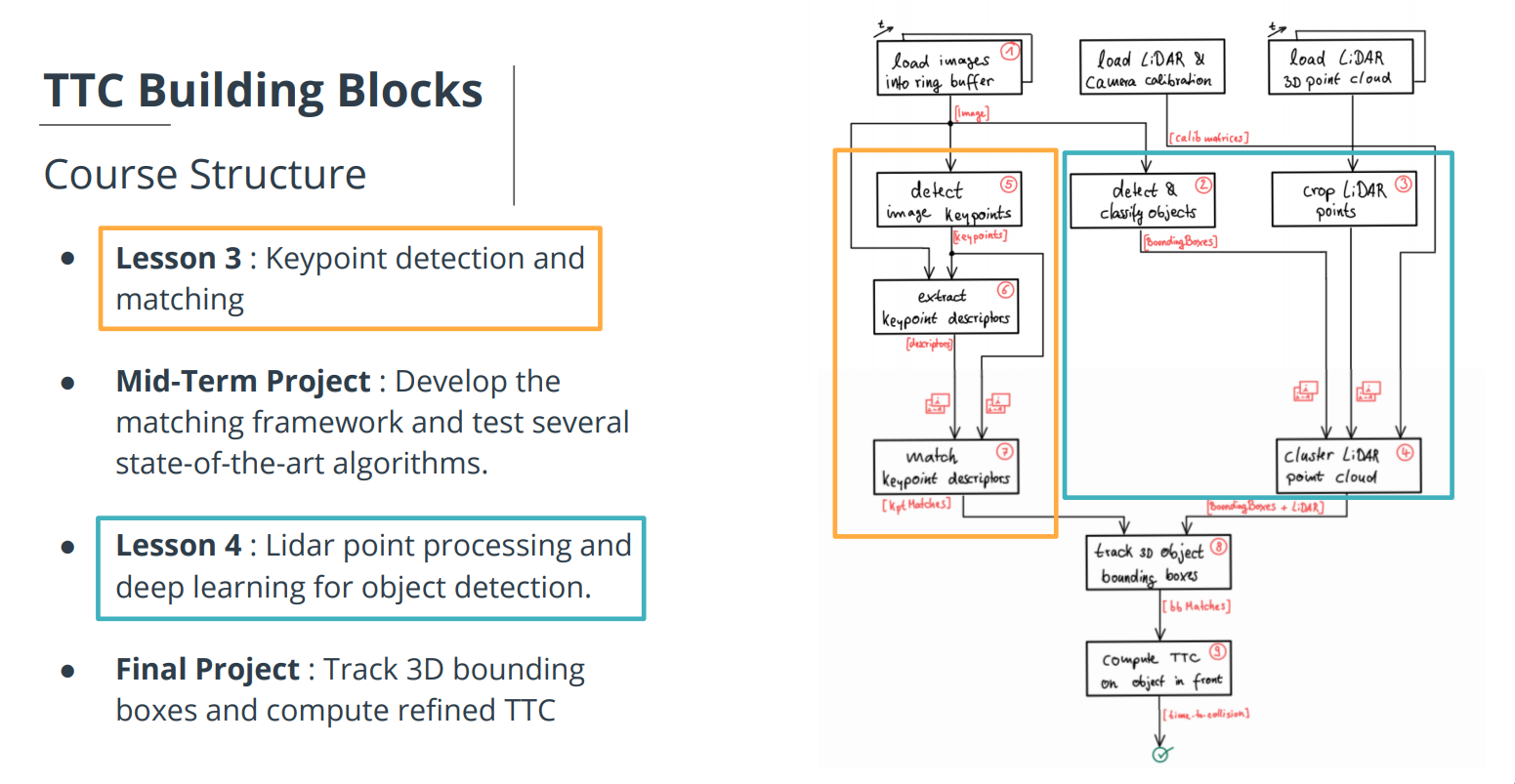
Using keypoint detectors, descriptors and YOLO deep-learning framework to track Objects in 3D space. Then, associate regions in a camera image with Lidar points.
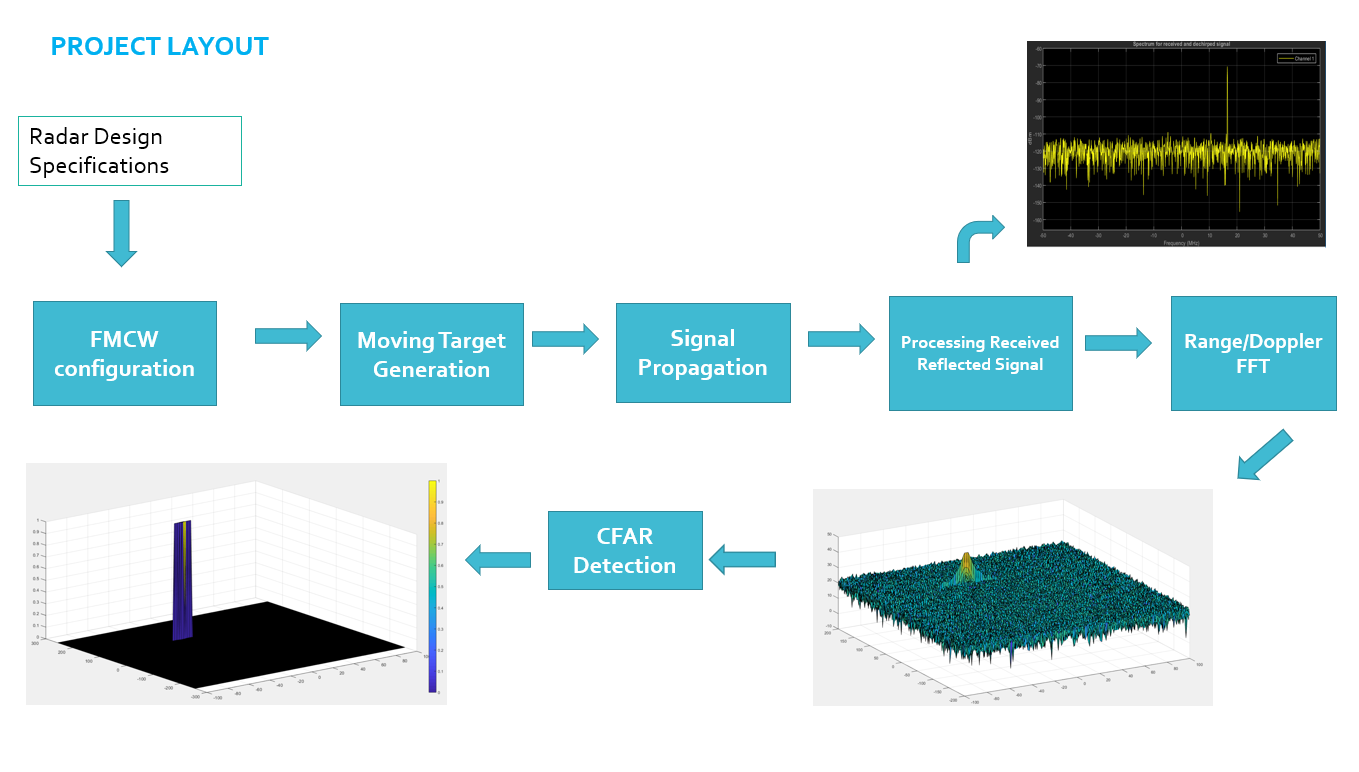
Simulate FMCW based on given requirements. Then, performing range FFT, 2D FFT, and CFAR processing to detect targets.
Implement an Unscented Kalman Filter to estimate the state of multiple cars on a highway using noisy lidar and radar measurements.